

完全国产化芯片
SPI接口的数字陀螺仪
Z轴敏感轴向
支持温度补偿
5V电源供电
低工作电流
LCC封装:8.84mm×8.84mm×3.10mm
-40℃~+85℃宽温度范围
IMU和导航系统
姿态检测
无人驾驶车辆
GPS协助
机器人技术
性能指标
测试条件:VCC =5V,TA=25°C,FS = ±400°/s,除非另有说明
参数 | 最小值 | 典型值 | 最大值 | 单位 | 测试条件 |
供电 | |||||
输入电压 | 4.75 | 5 | 5.25 | V | |
工作电流 | - | 18 | 20 | mA | |
陀螺角速率传感 | |||||
量程 | - | ±400 | - | °/s | |
带宽 | 150 | 200 | Hz | −3 dB | |
非线性度 | - | 100 | 200 | ppm | FS = ±400°/s |
角度随机游走系数 | - | 0.15 | - | °/√h | |
启动时间 | - | - | 1 | s | |
稳定时间 | - | - | 1 | min | |
抗冲击 | - | 1500 | 3000 | g | 冲击 0.5ms, 3轴(可持续考核) |
零偏 | |||||
零偏校准 | -2 | 0 | +2 | °/s | SPI数字输出 |
零偏不稳定性 | - | 1.5 | 2 | °/h | 常温,Allan方差 |
零偏稳定性 | 5 | 8 | °/h | 常温,标准差(1s平均) | |
零偏重复性 | - | 5 | 8 | °/h | 常温 7 组 |
零偏温度系数 | - | 1 | 3 | °/h/°C | 温度范围-40 ~ +85°C |
全温零偏稳定性(1σ) | - | - | 20 | °/h | 温度范围-40 ~ +85°C,(1℃/min) |
零偏g敏感性 | - | 1.3 | 2 | °/h/g | 补偿地球自转 |
振动特性 | |||||
振动前后零位变化 | 3 | °/h | 1)10-100Hz:3dB/oct 2)100-1000Hz:0.04g2/Hz 3)1000-2000 Hz:-3dB/oct 总均方根加速度8.06grms 时间 5min | ||
抗冲击 | 1500 | - | - | g | 冲击 0.5ms, 3轴 |
刻度因子 | |||||
刻度因子非线性 | - | 100 | ppm | ||
外形尺寸(单位:mm)
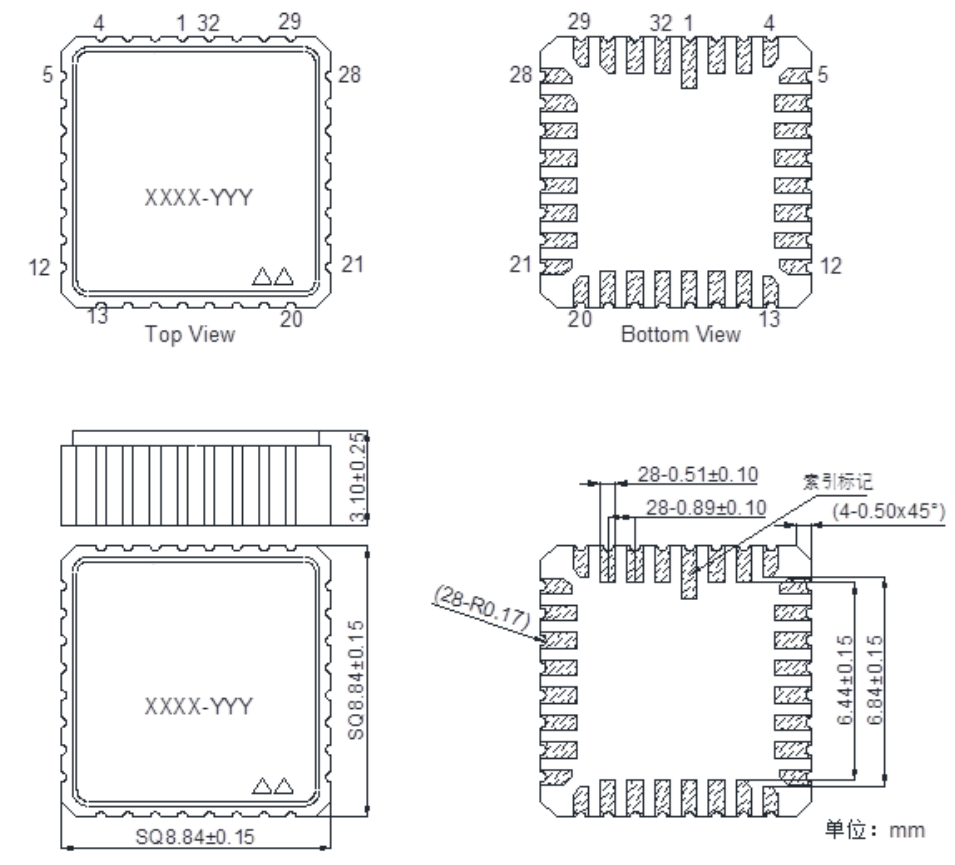
XXXX:批号;YYY:同批次序号
 微信二维码
微信二维码